Im folgenden Bericht möchte ich meinen Umbau eines Mercedes Atego der Firma MGM zu einem RC-Racetruck dokumentieren.
Zerlegen des Ausgangsmodells

Das Modell ist komplett zerlegt. Dies gelingt leicht, teilweise mit sehr sanfter Gewalt. Alle Teile sind nur gesteckt, nichts ist geklebt. der schwarze Hauptrahmen wird durch einen selbstkonstruierten und 3D-gedruckten Rahmen ersetzt. Die Reifen werden ebenfalls nicht mehr benötigt. Auch hier kommen eigenentwickelte Silikonreifen zum Einsatz
Komponenten für den Umbau

Das Bild zeigt alle Komponenten für den RC-Umbau. Links der Transponder für die Zeitnahme, weiter die Lenkung aus Messing, das gedruckte Chassis, oben den Lipo-Akku, unten das 1,7gr. Servo und rechts der Deltang-Empfänger RX45 mit Softwarestand 510. Ab SW-Stand 520 funktionieren die RX-45 Empfänger nicht mehr mit Pistolensendern. Als Ersatz taugt der RX-31, zusätzlich wird dann noch ein Fahrregler nötig.
Vorderachse und Lenkung

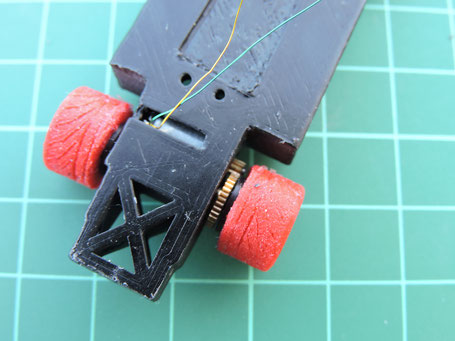
Die Vorderachse habe ich aus Messing 4-kant-Rohr 3x3mm angefertigt, passend dazu die Achsschenkel. Die Achse ist aus 1mm Rundmaterial.
Die orginal Plastikfelgen wurden ausgedreht und eine passende Hülse aus Messing gedreht. Diese nimmt jeweils 2 Kugellager 1x3x1mm pro Rad auf. An der Innenseite habe ich einen 0,3mm breiten Bund stehen lassen, um den Seitenhalt der Silikonreifen zu erhöhen.
Die Reifen sind selbst CAD.konstruiert, 3D-gedruckt und dann mit 2-Komponenten Silikon abgeformt und gegossen.Das rot der Reifen ist nur eine nette Spielerei und hat keinen funktionellen Hintergrund. Die orginal Plastikreifen taugen nicht zum fahren.



Die Vorderachse ist pendelnd im Chassis gelagert, das Servo stehend im späteren Fahrerhaus verbaut. Dabei habe ich den oberen Deckel des Servo-Gehäuses entfernt, um Platz zu sparen.
An die Spurstange ist ein Stück Messing 90Grad angelötet. Die Achse des Servos erhielt zwei 0,4mm Bohrungen. Ein gebogenes U aus 0,4mmMessing Rundmaterial lenkt die Spurstange an. Das alles muss ziemlich spielfrei sein, um genaue und schnelle Lenkmanöver zu ermöglichen.
Hinterachse und Antrieb
Die Hinterachse ist mit zwei 1x3x1mm Kugellagern im Rahmen gelagert. Der Antrieb besteht aus einem M1065 Motor 6x8mm mit ca.13800 U/min und einer Übersetzung 9 auf 35 Zähne.
Die ausgehölten Hinteradfelgen erhielten einen gedrehten POM-Einsatz ebenfalls mit einem 0,3mm Bund innen zum besseren Seitenhalt des Silikon-Reifens.
Endmontage




Jetzt wird alles verdrahtet. Der Deltang-Empfänger RX45 findet im Beifahrer.Raum Platz. Auf den Servo habe ich eine kleine Verteilerplatine zur Stromversorgung der Komponenten geklebt. Unten im Chassis finden der 200mAh Lipoakku Platz, sowie der Schalter und die Ladebuchse.
Zwischen Akku und Hinterachse wurde ein Ausschnitt zur Aufnahme der Buchse für den Transponder geschaffen. In der finalen Konstruktion wird das Chassis entsprechend geändert.
Fahrfertiges Modell

Der Umbau ist abgeschlossen, die ersten Probefahrten können beginnen. Ich bin auf die Fahreigenschaften gespannt, bei den bisherigen Fahrtests konnte ich auf zusätzliche Gewichte verzichten. Dies kann sich nach den ersten Runden auf der Rennstrecke durchaus noch ändern.
Abschließend habe ich die Optik des Fahrzeugs noch etwas verändert. Alle silbernen Teile sind schwarz lackiert. Die Reduzierung auf die Farben rot, gelb und schwarz gefällt mir gut.
Ich habe auch noch etwas mit den Reifen experimentiert, die gelbe Version besteht aus einer weicheren Silikonmischung. Auch hier müßen die Tests den Nutzen zeigen.
Mit dem Ergebnis des Umbaus bin ich zufrieden und freue mich auf erste spannende Trainings und Renneinsätzegemeinsam mit befreundeten Modellbaukollegen.




Folgende Teile wurden verbaut:
- 1x Lipo 200mAh
- 1x Micro-Servo 1,7gr.
- 1x Deltang-Empfänger RX45 SW 510
- 1x Motor M1068, ca.13800u/min
- 6x Kugellager 1x3x1mm
- 1x Ritzel 9 Zähne, gerade verzahnt
- 1x Ritzel 35 Zähne, gerade verzahnt
- 1x Mikro-Schiebeschalter
- 1x Buchse, 3polig, RM 1,27mm
-1x Transponder von "DasMikro" kompatibel zur Robitronik-Zeiterfassung